 |
Thermal Camera SDK 11.3.0
SDK for Optris Thermal Cameras
|
|
Thermal Camera SDK 11.3.0
SDK for Optris Thermal Cameras
|
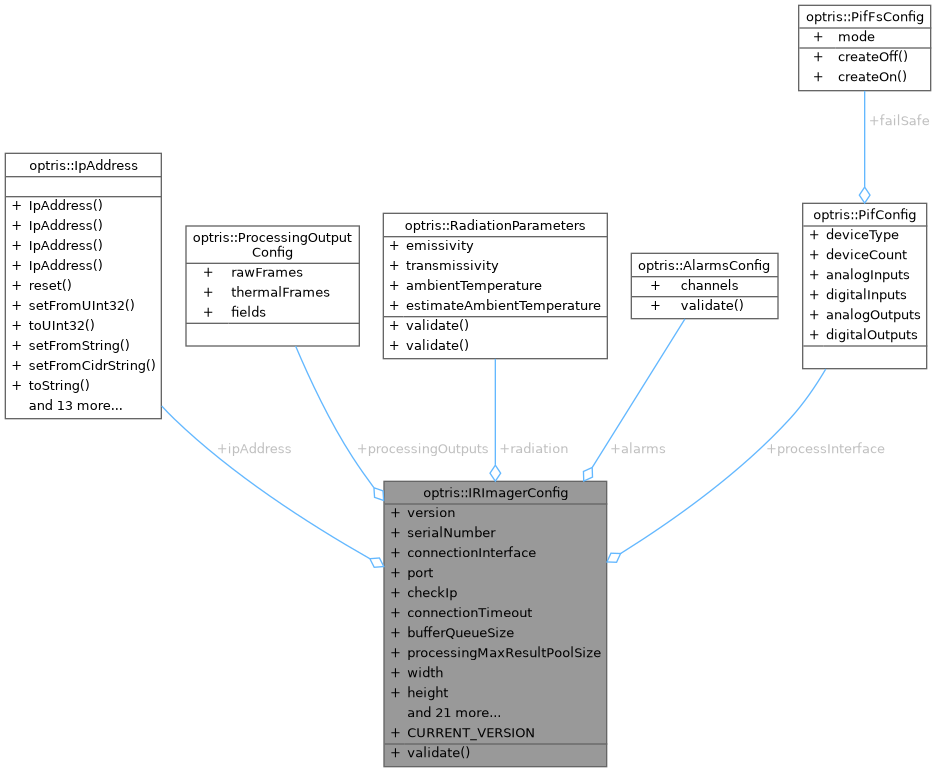
Holds the SDK settings found in the configuration file. More...
#include <IRImagerConfig.h>
Static Public Member Functions | |
| static OTC_SDK_API void | validate (IRImagerConfig &config) |
| Validates the configuration settings. | |
Public Attributes | |
| int | version = CURRENT_VERSION |
| Version of the configuration file. | |
| unsigned long | serialNumber = 0 |
| Serial number of the device. | |
| std::string | connectionInterface = "usb" |
| Interface used to connect to the device (USB, Ethernet). | |
| IpAddress | ipAddress = IpAddress{192, 168, 0, 101} |
| IP address of the device. | |
| unsigned short | port = 50101 |
| Local UDP port to which the device sends data to. | |
| bool | checkIp = true |
| Flag indicating whether to only process UDP packages from the IP address specified by the ipAddress member variable. | |
| int | connectionTimeout = 10 |
| Specifies the time in seconds that has to elapse without no new frame received until an connection timeout occurs. | |
| unsigned short | bufferQueueSize = 5 |
| Specifies the number of buffers that the subsystems receiving the raw frame data should use (DirectShow, V4L2, etc.). | |
| ProcessingOutputConfig | processingOutputs |
| Specifies which outputs should be computed and provided by the SDK. | |
| unsigned int | processingMaxResultPoolSize = 10 |
| Sets the maximum number of processing results that are pooled for reuse to avoid unnecessary allocations. | |
| int | width = 0 |
| Width in pixels of the output frame. | |
| int | height = 0 |
| Height in pixels of the output frame. | |
| int | framerate = 0 |
| Output framerate in Hz. | |
| float | subsampledFramerate = -1.F |
| Subsampled output framerate. | |
| int | fieldOfView = 0 |
| Field of view of the optics in degree. | |
| std::string | opticsText |
| Optional text further specifying the used optics. | |
| bool | enableSoSCorrection = true |
| Use Size of Source Correction if available in calibration data. | |
| RdcMode | rdcMode = RdcMode::Normal |
| Mode of radial distortion correction (RDC). | |
| int | minTemperature = 0 |
| Lower limit of the desired temperature range in °C. | |
| int | maxTemperature = 0 |
| Upper limit of the desired temperature range in °C. | |
| bool | enableExtendedTemperatureRange = false |
| Extends the chosen temperature range if possible. | |
| bool | enableHighPrecisionTemperature = true |
| Use high precision temperatures if available. | |
| bool | autoFlag = true |
| Enable the automatic triggering of flag cycles. | |
| float | minInterval = 12.F |
| Minimum time in seconds that has to pass before a new flag cycle can be triggered. | |
| float | maxInterval = 0.F |
| Maximum time in seconds that can pass before a new flag cycle is forced. | |
| ChipHeatingMode | chipHeatingMode = ChipHeatingMode::Floating |
| Specified how and if the sensor chip is beeing heated. | |
| float | chipHeatingTemperature = 40.F |
| Temperature in °C for the fixed chipHeatingMode. The provided value is clamped to [20, 55] °C. | |
| float | focusMotorPosition = -1.F |
| Position of the focus motor in % ([0, 100]). | |
| RadiationParameters | radiation |
| Radiation parameters for the overall thermal frame. | |
| bool | enableMultiThreading = false |
| Activate multithreading for postprocessing. | |
| bool | failSafeFlagTimeouts = true |
| Indicates whether a flag timeout that caused the failure of a flag cycle should trigger the fail safe. | |
| int | failSafeFlagTimeoutsMaxCycleFailures = 0 |
| Specifies the number of failed flag cycles to be tolerated before fail safe is triggered due to flag timeouts. | |
| bool | failSafeProcessingChainTimeouts = true |
| Indicates whether a failure of the processing chain to reach all of its endpoints (thermal frame and measurement fields) within a given time frame should trigger the fail safe. | |
| AlarmsConfig | alarms |
| Alarms configuration. | |
| std::vector< MeasurementFieldConfig > | measurementFields |
| Measurement field configuration. | |
| PifConfig | processInterface |
| Processing interface configuration. | |
Static Public Attributes | |
| static constexpr int | CURRENT_VERSION = 3 |
| Current version of the configuration file. | |
Holds the SDK settings found in the configuration file.
|
static |
Validates the configuration settings.
If a faulty setting can be replaced by a valid default this method will do so automatically and print a log warning message. If no valid default is available a SDKException is throws instead.
| [in,out] | config | to validate. |
| SDKException | if configuration contains uncorrectable invalid settings. |
| bool optris::IRImagerConfig::autoFlag = true |
Enable the automatic triggering of flag cycles.
Optris thermal cameras feature an internal shutter flag. It need to be closed periodically for the SDK to compensate for drifting temperature measurements.
If set to true, flag cycles will be automatically triggered when one of the temperatures measured by internal probes changes by more than 0.1 °C.
| unsigned short optris::IRImagerConfig::bufferQueueSize = 5 |
Specifies the number of buffers that the subsystems receiving the raw frame data should use (DirectShow, V4L2, etc.).
This setting has no influence on the size of the buffers. Their size is determined by the used video format.
| bool optris::IRImagerConfig::checkIp = true |
Flag indicating whether to only process UDP packages from the IP address specified by the ipAddress member variable.
Set to true to activate this check or set to false to deactivate it.
| std::string optris::IRImagerConfig::connectionInterface = "usb" |
Interface used to connect to the device (USB, Ethernet).
Case insensitive.
| int optris::IRImagerConfig::connectionTimeout = 10 |
Specifies the time in seconds that has to elapse without no new frame received until an connection timeout occurs.
If connection timeout is detected the IRImager instance will call the IRImagerClient::onConnectionTimeout() callback.
| bool optris::IRImagerConfig::enableExtendedTemperatureRange = false |
Extends the chosen temperature range if possible.
When extending the temperature range you do not need to change the values for minTemperature and maxTemperature. The range is always specified by the non extended temperatures.
| bool optris::IRImagerConfig::enableHighPrecisionTemperature = true |
Use high precision temperatures if available.
If true, high precision temperatures will automatically be used if the device and the chosen temperature range supports them.
| bool optris::IRImagerConfig::enableMultiThreading = false |
Activate multithreading for postprocessing.
| bool optris::IRImagerConfig::enableSoSCorrection = true |
Use Size of Source Correction if available in calibration data.
If true, Size of Source Correction will automatically be used if available in calibration data.
| bool optris::IRImagerConfig::failSafeFlagTimeouts = true |
Indicates whether a flag timeout that caused the failure of a flag cycle should trigger the fail safe.
A flag timeout occurs when the shutter flag does not reach its expected state within a given time frame. If this happens, the current flag cycle will be considered to have failed.
| int optris::IRImagerConfig::failSafeFlagTimeoutsMaxCycleFailures = 0 |
Specifies the number of failed flag cycles to be tolerated before fail safe is triggered due to flag timeouts.
| bool optris::IRImagerConfig::failSafeProcessingChainTimeouts = true |
Indicates whether a failure of the processing chain to reach all of its endpoints (thermal frame and measurement fields) within a given time frame should trigger the fail safe.
If set to false, the fail safe will still be triggered when the processing chain itself crashes or gets stuck.
| int optris::IRImagerConfig::fieldOfView = 0 |
Field of view of the optics in degree.
If the field of view is set to 0 and the opticsText is empty the SDK will use the first available optics.
| float optris::IRImagerConfig::focusMotorPosition = -1.F |
Position of the focus motor in % ([0, 100]).
Should be in [0., 100.]. Set to a value less than 0 for the SDK to ignore this setting.
| int optris::IRImagerConfig::framerate = 0 |
Output framerate in Hz.
If width, height and framerate are all set to 0 the SDK will use the first available video format.
| int optris::IRImagerConfig::height = 0 |
Height in pixels of the output frame.
If width, height and framerate are all set to 0 the SDK will use the first available video format.
| int optris::IRImagerConfig::maxTemperature = 0 |
Upper limit of the desired temperature range in °C.
Always use the temperatures for the not extended range.
If the minimum and maximum temperature are set to 0 the SDK will use the first available temperature range.
| int optris::IRImagerConfig::minTemperature = 0 |
Lower limit of the desired temperature range in °C.
Always use the temperatures for the not extended range.
If the minimum and maximum temperature are set to 0 the SDK will use the first available temperature range.
| std::string optris::IRImagerConfig::opticsText |
Optional text further specifying the used optics.
If the field of view is set to 0 and the opticsText is empty the SDK will use the first available optics.
| unsigned int optris::IRImagerConfig::processingMaxResultPoolSize = 10 |
Sets the maximum number of processing results that are pooled for reuse to avoid unnecessary allocations.
The processing pipeline reuses the same objects to store its results. This setting specifies the maximum number of these objects that are can exist at the same time. If the client callbacks handling the processing results are too slow, the SDK will start to override already existing results. This effectively results in frame drops.
Buffers are only added as needed.
If set to 0, the maximum pool size will be set to 1.
| RadiationParameters optris::IRImagerConfig::radiation |
Radiation parameters for the overall thermal frame.
For the radiation parameters of measurement fields see the MeasurementFieldConfig class.
| RdcMode optris::IRImagerConfig::rdcMode = RdcMode::Normal |
Mode of radial distortion correction (RDC).
The following modes are available:
This has only an impact if the required parameters are provided by the calibration.
| float optris::IRImagerConfig::subsampledFramerate = -1.F |
Subsampled output framerate.
The SDK internally reduces the output framerate to this value. This setting has no effect on the device itself, meaning the device will always send frames at the rate specified by the framerate member variable.
Set to a value in [0, framerate] to achieve subsampling or set to a value to less than 0 to deactivate this feature.
| int optris::IRImagerConfig::width = 0 |
Width in pixels of the output frame.
If width, height and framerate are all set to 0 the SDK will use the first available video format.